사람이 거주하는 무거운 벌통을 운반해야하는 이유는 양봉장의 이동 또는 그에 대한 계절 작업 때문입니다. 예를 들어, 곤충이 처음으로 날기 위해서는 봄에 벌집을 겨울 집에서 꺼내야합니다. 아니면 양봉장은 유목민을 위해 여름에 가야 할 것입니다. 가을에는 다시 겨울 분기에 정착 할 것입니다. 또한 양봉장 카트는 파빌리온 양봉에 없어서는 안될 필수품입니다. 가을에는 각 가족당 약 XNUMX 개의 XNUMX 리터 용기입니다. 그리고 작은 수레에서 꿀 프레임을 운반 할 수 있습니다.
또 다른 중요한 장치는 양봉가가 꿀벌 식민지의 개발을 제어하는 데 사용하는 비늘입니다. 손으로 조립할 수도 있습니다.
기사의 내용
- 1 카트 분류
- 2 수제 apilift
- 3 수제 카트
- 4 수제 저울
카트 분류
디자인 기능에 따라 구별됩니다.
- 작업에 적합한 사다리와 카트;
- 리프트 또는 apilifts.
사다리 작업은 다음과 같습니다. 모서리에서 용접 된 사다리가 트럭에 부착됩니다.

사다리의 치수는 트롤리와 일치해야 적재시 미끄러지지 않습니다.

로드는 다음과 같이 수행됩니다.
첫 번째 단계.

두 번째 단계.

세 번째 단계.

네 번째 단계.

이런 식으로 적재 할 때 기동성이 결정적인 역할을합니다. 트롤리는 트럭 본체 내부에서 쉽게 움직여야합니다. 이것은 디자인을 개선하여 달성 할 수 있습니다.
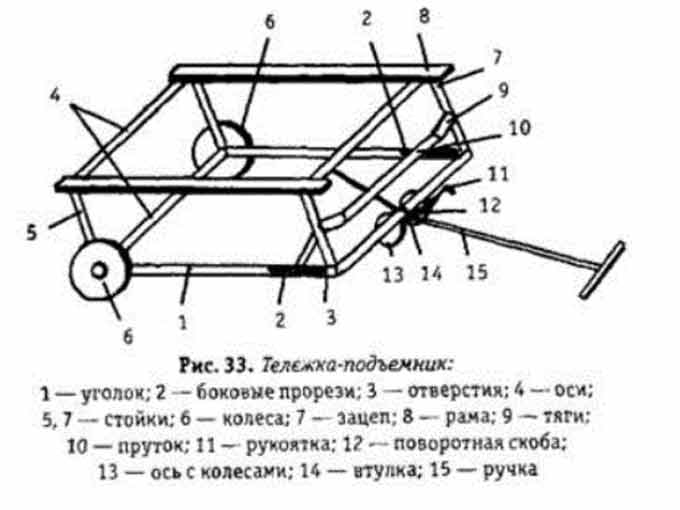
원칙적으로 카트가 레버의 원리로 제작 된 경우 적재 작업은 독립적으로 처리 할 수 있습니다. 추가 핸들이나 구조적 굴곡이 없습니다. 이러한 “레버”는 수평 및 수직으로 사용하기에 편리합니다.
이 경우 축 (지지대)이 가능한 한 낮게, 즉지면에 더 가까운 것이 중요합니다. 전체 카트의 높이는 대략 로더의 어깨 높이까지입니다.
중요 : 길쭉한 버전은 기동성을 감소 시키므로 핸들 길이에 너무 열심하지 않는 것이 좋습니다. 그러나 동시에 사용하기 쉽도록 똑 바르고 길어야합니다.
로더를 멈출 수있는 계단이있는 경사 플랫폼이 사다리로 사용됩니다. 많은 양봉가는 의도적으로 리프트 사용을 거부하면서 그러한 적재를 선호합니다.

그리고 이것은 차체 나 트레일러에 적재하는 바로 그 방법입니다. 레버 (즉, 직선 디자인)는 각 단계의 통과를 용이하게합니다. 단계의 본질은 사람의 근육에 휴식을주는 것입니다. 벌통을 재배치하기 어렵게 만드는 것은 양봉가의 피로입니다.
곡선 핸들이있는 트롤리와 계단이없는 클래식 사다리로 작업합니다. 그러나이 예에서 벌집의 무게가 작고 트레일러 플랫폼까지의 높이도 작다는 점은 주목할 가치가 있습니다.

두 번째 로딩 옵션은 업 리프트를 사용하는 것입니다. 이것은 민속 장인이 현대화 된 카트를 독립적으로 제조하는 것을 결정하는 매우 비싼 장비입니다.
범용 상점 모델에는 조정 가능한 그립이 있습니다. 즉, 다양한 유형의 꿀벌 집, 배럴 및 기타 컨테이너를 운반 할 수 있습니다. 그러나 들어 올리는 높이와 짐의 무게 (일반적으로 최대 150kg)에 제한이 있습니다.

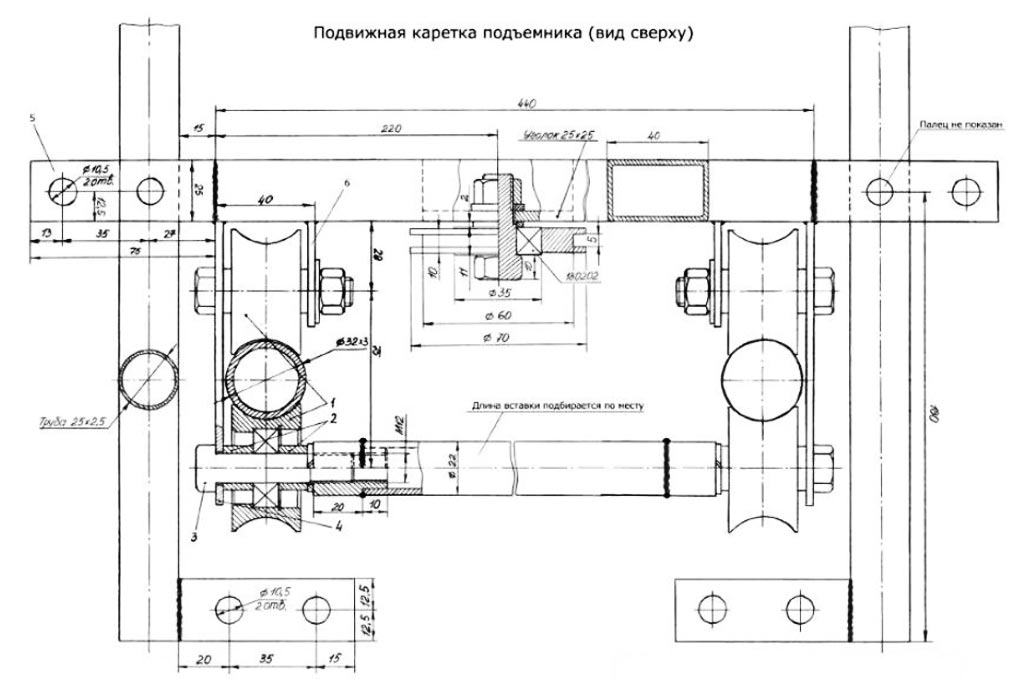
이러한 장비는 바퀴가 달린 하나의 축에 장착 된 두 개의 프레임으로 조립됩니다. 케이블, 포크 및 클램프 브래킷이있는 레버를 포함합니다. 특수 나사를 사용하면 로더를 조정하여 다양한 크기의 부하에 맞출 수 있습니다.
Apilift가 하이브로 이동합니다. 동시에 레버가 올라갑니다. 브래킷은 나사로 조정됩니다. 양봉장과 리프트 사이의 간격은 5mm를 초과하지 않아야합니다. 그런 다음 핸들이 내려갑니다-레버가 하중을 단단히 잡습니다. 벌통은 윈치를 통해 높이까지 올라갑니다.

수제 apilift
리프트 제조용 도면-아이디어는 Igor Sidorov에 속합니다.
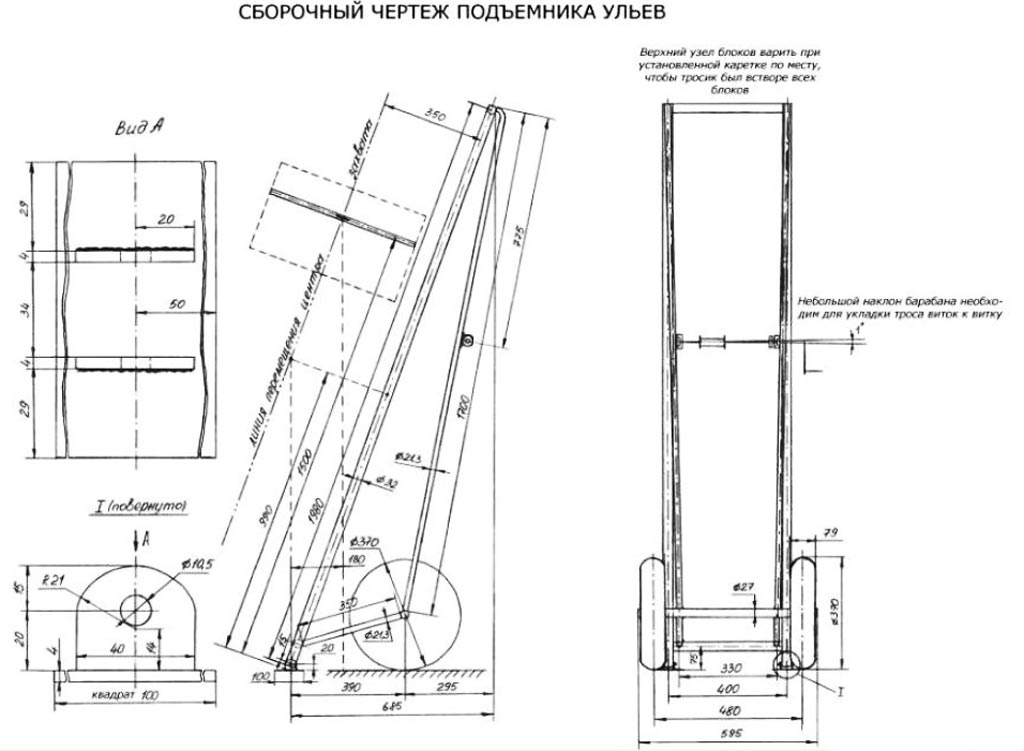
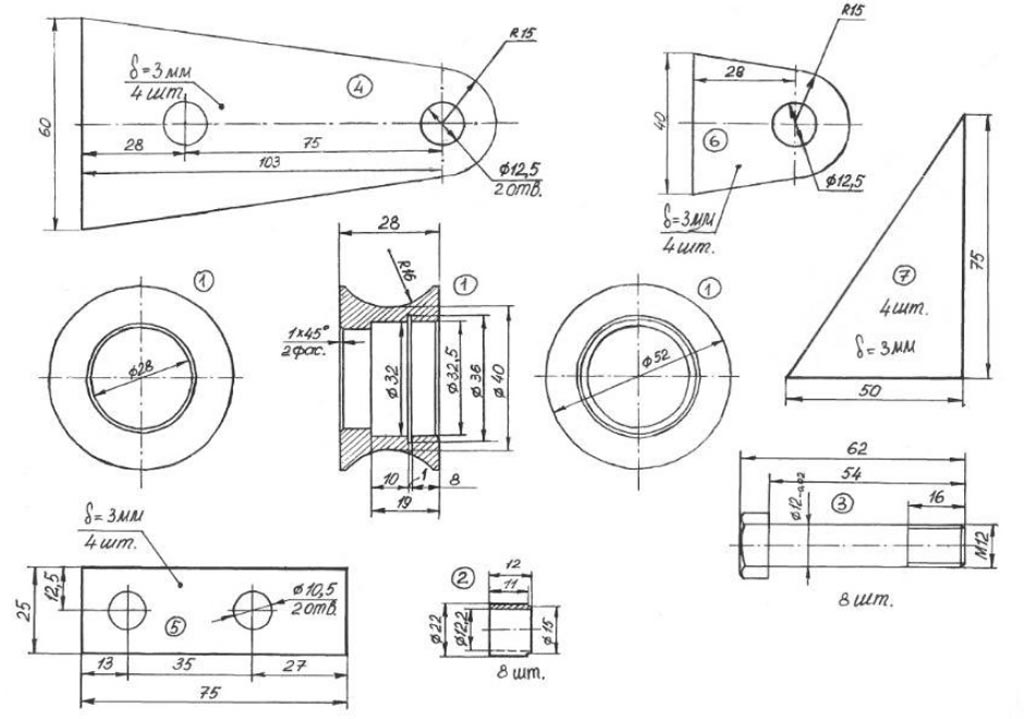
적절한 경험, 필요한 모든 도구 및 장비, 특히 용접 기계가있는 경우에만 손으로 편리한 장치를 만들 수 있습니다. 조립은 캐리지, 리프팅 메커니즘, 프레임이 장착되는 여러 단계로 수행됩니다. 기계식 드라이브를 설치하면 트롤리를 쉽게 제어 할 수 있습니다.
또 다른 옵션은 나사 손잡이가있는 수제 모델입니다.… 다음과 같이 보입니다.
조립 기능 :
- 하단 고정 프레임은 U 자형입니다. 스트립 메탈 포스트가 장착 된 액슬이이베이스에 부착됩니다.
- 이동식 프레임은 모서리에서 용접되어 XNUMX 개의 별도 포스트에 장착됩니다.
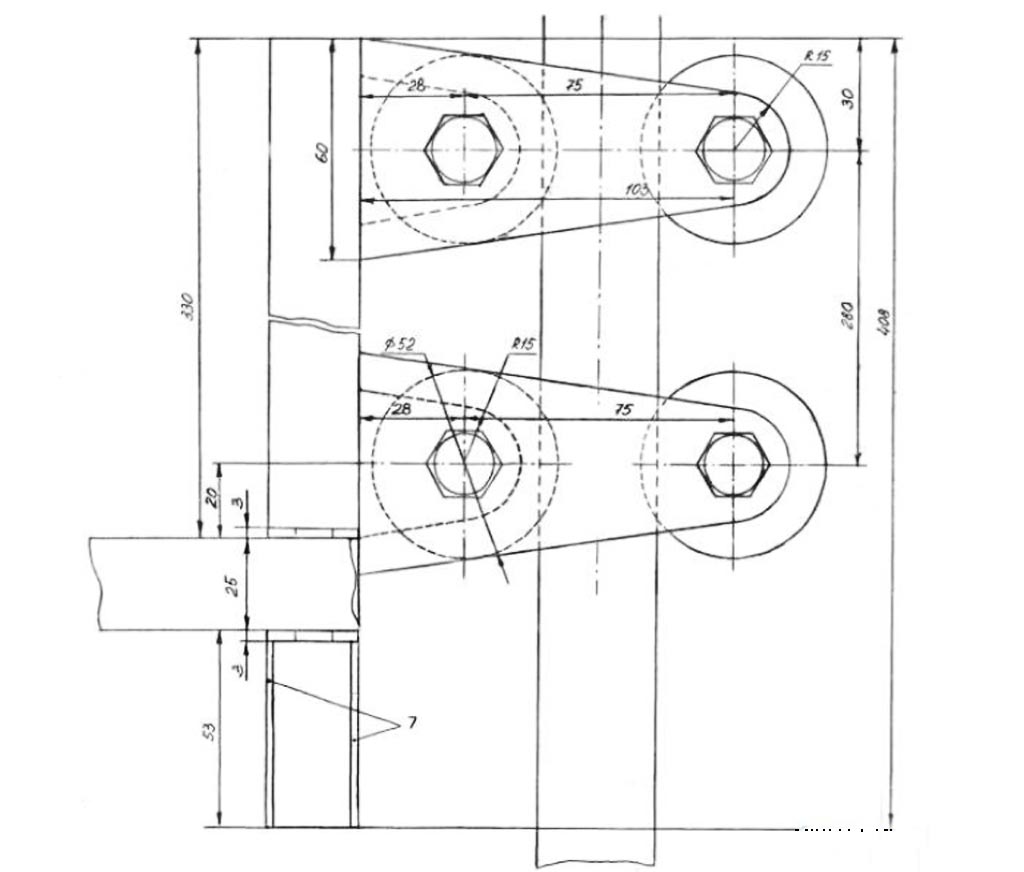
- 로드는 프론트 라이저에 부착되고로드에 용접됩니다. 로드는 하부 프레임의 홈 (구조물의 기초)에서 자유롭게 움직입니다.
- 앞바퀴 축에는 핸들에 용접 된 허브가 있습니다. 액슬은 볼트와 너트를 사용하여 핸들 앞의 피벗 브래킷에 장착됩니다.
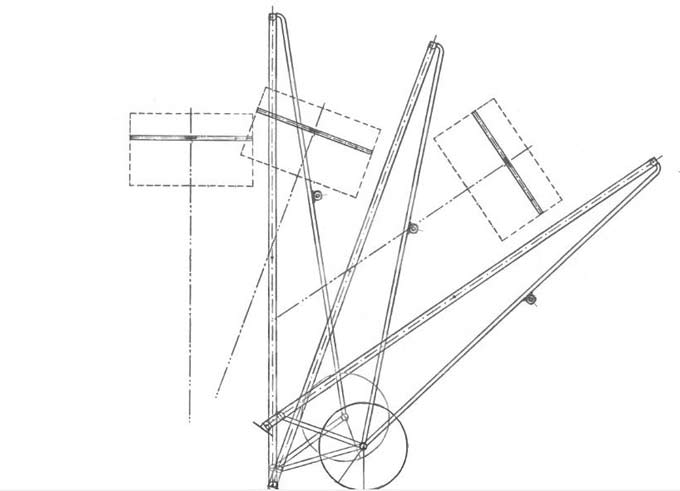
이 장치는 간단하게 작동합니다. 손잡이를 돌리면 꿀벌 집이 스탠드 위에 있도록 (이동식 프레임이 동시에 낮아집니다) 그런 위치에 도달합니다. 그런 다음 벌통을 옮기고 카트를 랙 사이에 놓고 손잡이를 돌려 집을 새로운 장소에 놓습니다.
수제 카트
다음은 간단한 장바구니를 만들기위한 몇 가지 아이디어입니다.
이 모델은 꿀이 채워진 XNUMX 체 벌통을 운반하는 데 적합합니다.

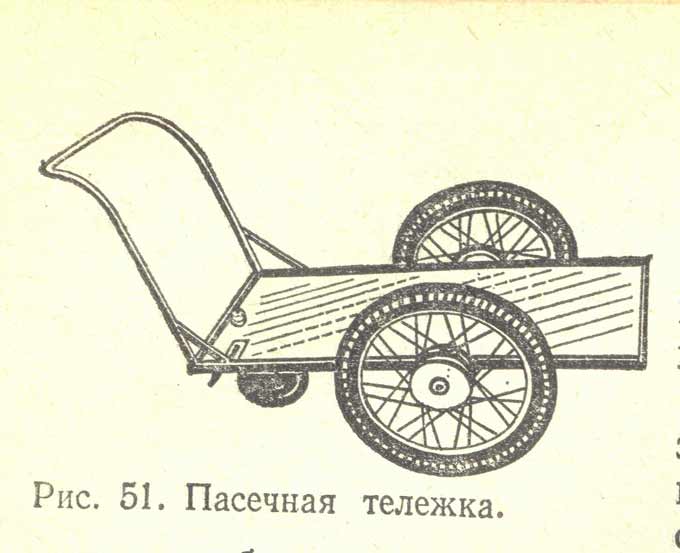
그리고이 모델은 모서리와 부속품을 사용하여 오래된 유모차를 기반으로 도면없이 용접되었습니다. 이러한 구조에서는 16 프레임 벌통을 문제없이 운반 할 수 있습니다. 두 번째 모델 (왼쪽)은 플라스크 운반용으로 설계되었습니다.

튜토리얼의 모델. 깔끔한 도로에서 이러한 구조는 최대 300kg의 하중을 견딜 수 있습니다! 불행히도 우리는 그것을 조립하는 정확한 지침이 없습니다.
관심이있을 수 있습니다 : 벌집 운반을위한 DIY 카트
수제 저울
벌통의 무게 측정에 관해서는 여기 장인이 몇 가지 디자인 옵션을 제공합니다.
하네스를 사용하는 가장 쉬운 방법은 블록, 강철 케이블 및 추로 조립하는 것입니다.
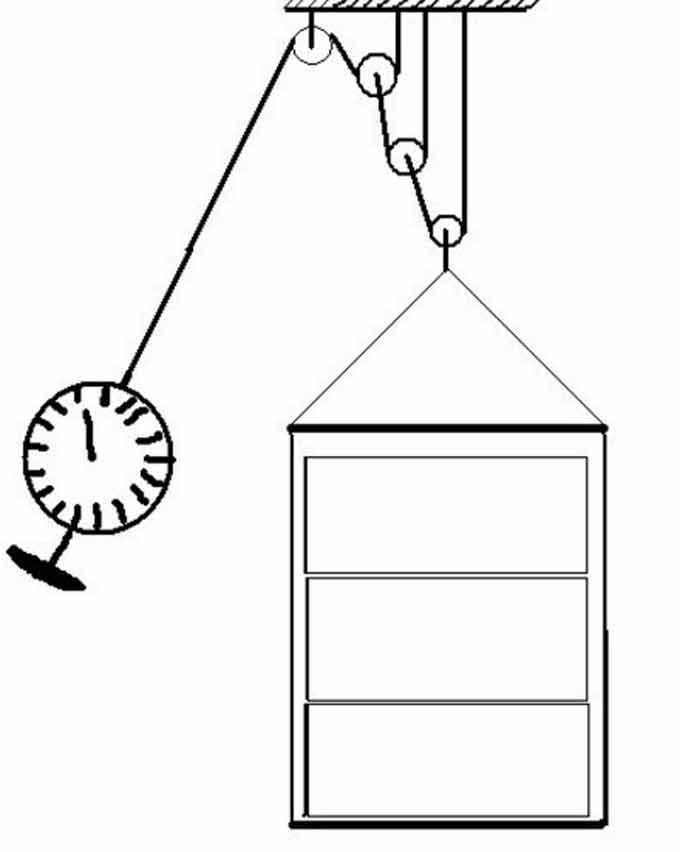
최대 100g의 계량 오류. 스케일의 정확도에 사용 된 블록 수를 곱하여 설정할 수 있습니다.
더 어려운 옵션은 스트레인 게이지 설계를 사용하는 것입니다.:
하단은 고정되어 있으며 센서, 전자 장치 및 전원 버튼이 장착됩니다. 블록과 버튼을 꺼내어 편리한 위치에 고정합니다 (사진에서 이것은 앞 좌측의 위치입니다). 로드셀은 XNUMX 개의 와이어가있는 두랄루민 플레이트입니다.

상단 가동 부분은 레버에 있습니다. 두 개의 스프링으로베이스에 고정됩니다.
4 개의 베어링이있는 모서리의 프레임은 XNUMX 개의 나사를 사용하여베이스에 장착됩니다.


너트가 프레임에 용접되어 핸들이 나사로 고정됩니다. 아래쪽 프레임과 함께 눈금을 2cm 올리는 데 사용할 수 있습니다.
계량을 위해 양봉장 바닥 아래에 5,5cm 높이의 막대를 설치하거나 벌통 바닥 구조의 일부가 될 수 있습니다. 이 방법으로 얻은 틈새에 저울을 삽입 할 수 있습니다. 그런 다음 시작 버튼을 눌러야합니다. 디스플레이에 XNUMX이 표시됩니다 (자동 영점이 설정 됨). 또한 손잡이를 돌려 벌통을 들어 올리고 무게를 잰다. 그런 다음 핸들이 반대 방향으로 회전합니다. 저울이 부하를 제거합니다.

모든 베어링은 동시에 작동합니다. 바닥이 평평한 벌집을 떨어 뜨리는 것은 불가능합니다. 2cm의 상승은 손잡이를 XNUMX 번 돌려서 수행됩니다.
디자인의 기본은 340mm 너비의 로드셀 XNUMX 개 (유리 모델에는 XNUMX 개의 센서가 있으며 적합하지 않음)가 장착 된 금속 케이스의 일반 중국 스케일입니다. 예를 들어 다음과 같은 모델이 작동합니다.

자신의 손으로 조립 한 이러한 자체 제작 양봉장 저울의 도움으로 모든 벌통의 무게를 하나씩 측정하고 얻은 결과를 별도의 테이블에 작성할 수 있습니다. 결과적으로 빈 벌집의 무게를 알면 벌과 채취 한 벌꿀의 무게를 정확하게 파악할 수 있습니다.
양봉가는 오토로더로 갈 필요가 있기 때문에 전자 저울을 정확히 싫어한다는 점에 유의해야합니다. 즉, 계량을 시작할 때 저울을 언로드해야합니다. 그러나 제시된 자체 제작 모델 에서이 문제는 실제로 레버를 돌리면 문자 그대로 해결됩니다.





를 꿀 식물로 사용")









")
")





는 꿀 식물로")






